Датчик представляет собой электромагнитную катушку с магнитным сердечником. Корпус индуктивного датчика, применяемого в системе управления, выполнен из высокопрочной пластмассы и имеет фланец для крепления датчика. Датчик выполнен неразборным и имеет соединительный кабель с трехконтактной вилкой.
Для нормальной работы системы управления необходимо, чтобы зазор между датчиком и вершиной зуба зубчатого сигнального диска находился в пределах 0,5...1,0 мм. Сопротивление обмотки датчика 880...900 Ом. Полярность первой полуволны сигнала датчика определяется полярностью постоянного маг-нита, направлением намотки индуктивной катушки, а также направлением изменения магнитного сопротивления (увеличивается или уменьшается) в воздушном зазоре между датчиком и объектом вращения.
Для данного датчика первая полуволна выходного сигнала является положительной, что надо учитывать при подключении датчика в систему управления или при поиске причин неудовлетворительной работы двигателя. Датчик положения коленчатого вала является основным датчиком системы, позволяющим блоку управления:
- определять направление вращение двигателя;
- в соответствии с сигналами этого датчика генерировать импульсы на форсунки для осуществления топливоподачи;
- формировать управляющие сигналы для катушек зажигания.
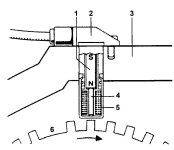
Рис. 1.2.2 Расположение датчика углового положения коленчатого
Неисправности в цепи датчика положения коленчатого вала не позволяют эксплуатировать двигатель.
Принцип работы. На шкиве коленчатого вала находится специальный диск с 58-ю зубцами. Диск выполнен из магнитомягкого материала с угловым расстоянием между зубьями 6 градусов.
ДПКВ содержит индукционную катушку (5), размещенную около постоянного магнита (1). Полюс постоянного магнита, обращенный к объекту вращения, имеет на торце магнитопровод (4) из магнитомягкого материала, который установлен с зазором относительно вращающегося зубчатого диска (6). При движении зубьев вблизи магнитопровода величина зазора меняется, что вызывает изменение магнитной индукции и появление электрического импульса в индукционной катушке.
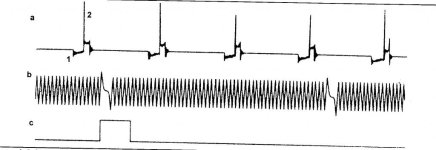
Импульс(ы) будет двухполярным, в форме двух пикообразных полуволн, симметрично расположенных относительно оси, проходящей через нулевую точку.
Нулевая точка импульса соответствует центру каждого зуба, что позволяет с большой точностью определить их положение. Блок управления распознает импульсы с датчика и синхронизирует работу системы с положением коленчатого вала и тактами работы двигателя.
Рис. 1.2.3 Сигнал с датчика коленчатого вала.
а - напряжение на катушке зажигания; b - напряжение с датчика положения коленчатого
вала; с - напряжение с датчика положения распределительного вала.
Помехи, возникающие в цепи датчика коленчатого вала, отслеживаются блоком управления и фиксируются системой самодиагностики как неисправность с кодом 53. Программное обеспечение блока пытается пересинхронизировать процесс управления в этом случае. Для снижения уровня помех провод с датчика KB защищен экраном.
Для обеспечения функционирования двигателя необходимо, чтобы коленчатый и распределительный вал имели четко определенную начальную ориентацию. Если коленчатый вал установлен в положение, соответствующее верхней мертвой точке поршня первого цилиндра, то напротив середины сердечника датчика положения коленчатого вала должен находиться 20-й зуб диска синхронизации, считая против направления вращения от места выреза. При этом риска на цилиндрической поверхности демпфера коленчатого вала должна находиться напротив прилива (метка М5), выполненного на крышке цепи механизма газораспределения.



")